SYMETRIES A VOIR OU A IMAGINER
Dimension 3 |
Dimension 4 |
||||
Comprendre la photo à l'aide du schéma...
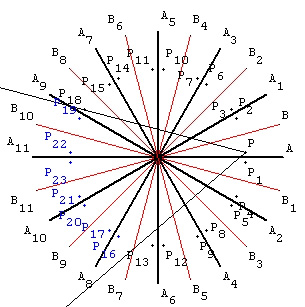
A désigne le bord du miroir tenu par le photographe et B le bord du miroir invisible!
P désigne le photographe et les 1/2 demi-droites issues de P délimitent le champ de la photo sur laquelle on reconnaît de gauche à droite :P16, P17 P20 P21 P23 P22 P19 qui sont des images de P
Seuls P, A et B sont réels. A représente un miroir dont le bord est blanc (noir sur le dessin) B est un second miroir assez propre pour qu'on ne le détecte pas sur la photo.
Les objets numérotés sont virtuels.
P1 est l'image de P dans A et P2 l'image de P dans B.
Les suivants sont les images des précédents, alternativement dans A et dans B.
On procède de la même manières pour A1 B1..A11 B11.
Notons au passage que si par exemple P8 et P9 sont symétriques par rapport à A4 c'est dû aux propriétés d'isométrie des diverses réflexions utilisées pour la construction de A4 P8 et P9.
Ainsi A4 n'est pas nécessaire pour construire P9 en fonction de P8.
Ici P8 et P9 ont été obtenus comme symétriques de P6 et P7 par rapport à A.
On remarquera que la tête de P23 est en 2 morceaux qui donnent l'illusion d'un seul personnage.
En fait P, qui soutient le miroir B ne prend la photo que lorsque la coïncidence précédente est réalisée.
Mathématisation et généralisation
L'intention est de mettre en évidence des figures dont les points sont associés par des symétries.
Fk(..)_(...).. est une notation dans la quelle k désigne le nombre de points initialement nécessaires à la construction de la figure. La nature de celle-ci sera précisée au fur et à mesure.
k pourra éventuellement valoir 0. Il ne reste alors plus que la Famille des symétries.(F comme famille pour k=0, et F comme figure dans le cas contraire)
Dans chaque parenthèse figure une liste de vecteurs associés à des symétries, soulignés ou non selon la place des points initiateurs de la figure.
Plus en détails...
Sauf avis contraire on notera les indices entiers en caractères gras, les vecteurs en minuscule sans flèche et les ponts en majuscule avec la correspondance : a= vect (OA) .etc.
Considérons une famille de symétries ayant au moins un point fixe O.
Traditionnellement les symétries sont définies par rapport à l'ensemble de leurs points fixes : symétrie par rapport à un point, une droite ou un plan. Or la symétrie par rapport à un point modifie 2 directions dans le plan mais 3 dans l'espace. Nous ne considérerons que des symétries (vectorielles ou affines) notées Sk (k entier) ne modifiant qu'une direction.
Cette direction Dk sera dirigée par un vecteur unitaire ik ou son opposé. -ik.(qui sont des vecteurs propres de la symétrie). L'ensemble des points fixes ou invariants sera noté Tk ,ensemble orthogonal de Dk. Notons que la dimension de l'espace de référence n'est pas mentionnée.
On dira que Dk est la droite propre de Sk.
Si i et j sont 2 vecteurs unitaires le cosinus de leur angle (i, j) est donné par le produit scalaire i.j et la projection de j sur i est : j1= (i.j) i Ainsi on aura j' =Sk(j) = j-2(ik.j) ik
Le but du jeux est de réunir dans une même famille qu'on qualifiera alors de complète des symétries telles que pour tout couple d'entiers p, q, il existe r, tel que l'image de ip par Sq soit un vecteur directeur de Dr ou encore que
Sq(Dp)=Dr
On choisira pour diriger Dr le vecteur ir= - Sq(ip).
De cette manière on a l'égalité des angles (ip, iq) et (iq, ir).
On choisira pour évaluer l'angle de 2 droites non perpendiculaires, l'angle aigu qui ne dépend que de la valeur absolue du cosinus de l'angle des vecteurs directeurs choisis.
Une condition nécessaire portant sur l'angle de 2 vecteurs de base de la famille:
Supposons qu'une famille complète existe. Appelons i0 et i1 les vecteurs directeurs des 2 droites formant entre elles le plus petit angle mesurant a radians.
i2 dirige S1(D0), i3 dirige S2(D1) etc. avec (i0,i1)=(i1,i2) etc.
Si p est le plus grand entier tel que a p< p, l'angle entre D0 et Dp ne peut être supérieur à a en raison de la définition de a ni inférieur à a en raison de la définition de p. Autrement dit l'angle entre D0 et Dp mesure également "a".
En résumé
il existe un entier n= p+1 tel que a = π /n
La famille contient donc au minimum n symétries.
Leurs droites propres sont dans le plan de repère (O,i0,i1) et elles forment entre elles des angles de la forme :
k π / n avec 2k ≤ n (n et k entier premiers entre eux )
Supposons qu'il existe une symétrie ne faisant pas partie des n définies ci-dessus. Sa droite propre apparaîtrait dans un des secteurs délimités par 2 des droites précédentes formant entre elles un angle de π/n .Cela contredirait l'hypothèse disant que π/n serait la mesure minimale des angles de droites.
La condition nécessaire est donc ici suffisante.
Illustration
Ak est un des 2 points d'intersection de Tk avec le cercle unité.
Un vecteur ik est colorié en cyan et Tk en noir
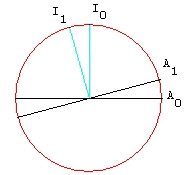
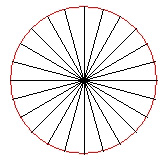
La figure de gauche illustre les 2 symétries de bases et celle de droite la famille complète .L'angle (i0,i1) vaut π/12
Une base est une famille de vecteurs, libre au sens habituel, et génératrice au sens qui apparaît ici. En particulier 2 vecteurs unitaires opposés définissent la même symétrie
Plusieurs bases sont possibles
Si on note F0(i0,i1) la famille complète de symétries laissant un même point invariant, contenant S0 et S1, on vérifie qu'elle est identique à F0 (i0,i5). Seul l'ordre de construction des vecteurs directeurs est modifié. On construirait alors dans l'ordre : i10, i15, i8, i1,i6, i11, i4, i9, i2,i7
On ne peut pas choisir 2 directions au hasard en raison de l'existence de sous familles.
Par exemple F0 (i0,i6) ne contient que les 2 symétries S0 et S6 car i0 et i6 sont orthogonaux.
F0 (i0,i4) contient 3 symétries car (i0,i4)= π /3 et on dira que cette famille est d'ordre 3
F0 (i0,i4) contient 2 symétries de base. On dira qu'elle est de dimension 2 (indépendamment de la dimension de l'espace vectoriel ou affine dans lequel on travaille).
Figures du plan :
F1(i0) :
L'indice 1 fait référence au fait que la figure est définie par la donnée d'un seul point initial.
La famille associée à la figure est de dimension 1. Elle ne contient que S0
On remarque ici que la dimension de la famille est inférieure à celle de l'espace des points. La figure engendrée est un segment. On l'a donc enrichie de l'enveloppe convexe de l'ensemble de ses extrémités.
F1( , )
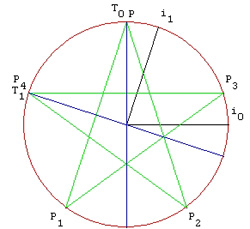
*/Considérons la figure notée F1(i1,i0).(avec toujours (i0,i1) = π /12)
Remarque sur la notation et la dénomination. Cette figure est générée à partir d'un point et elle est associée à la famille de symétrie notée F0(i0 , i1 )
Pour la construire on choisit un point P du cercle unité situé dans le secteur aigu délimité par T0 et T1 de manière que la distance de P à T1 soit plus grande que sa distance à T0, tenant ainsi compte de l'ordre d'écriture des vecteurs
Q est l'image de P par S1 et R l'image de P par S0.
Le fait d'avoir souligné i1 impose PQ non nul. De même PR est non nul
La figure s'enrichit alors les images successives des points par S0 et S1 et par les côtés homologues de PQ et PR
La famille sous-jacente des symétries de la figure étant finie, le nombre de points est limité.
Notons que chaque segment est révélateur d'un Tk donc d'une symétrie de la famille
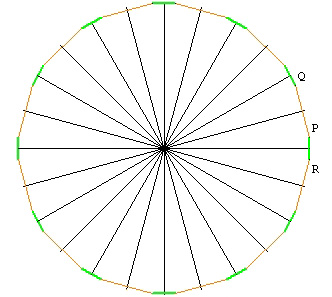
Cette figure rappelle l'exemple introductif mais s'en distingue par le fait que les miroirs sont remplacés par des droites
Toute figure notée F1(i1,i0).(avec (i0,i1) = π /n) contient 2n points reliés entre eux pour délimiter un domaine convexe. Elle est de surcroît invariante par chacune des n symétries de la famille F0 (i1,i0)
*/Considérons la figure notée F1(i1,i0) .(avec (i0,i1) = π/n)
Le fait qu'un seul vecteur de base de la famille sous-jacente soit souligné fait de la figure une figure singulière.
Un point P initial sera choisi tel que PQ est non nul et PR=0.
Autrement dit P est dans T0. On choisira un des 2 points d'intersection de T0 avec le cercle unité. Par rapport à la figure précédente le nombre total de points est divisé par 2 (les segments "verts" sont réduits à des points). Tous les segments bordant la figure sont de même longueur. Le dessin obtenu est un polynôme régulier à n côtés. On considère que cette figure contient le domaine convexe délimitée par les segments qui la bordent.
De même la figure notée F1(i0,i1) est un polynôme régulier à n côtés.
Ces 2 polygones sont duaux ou conjugués au sens qui sera précisé en dimension 3
Dans le cas particulier où n=2 le polygone est dégénéré et se réduit à un segment.
A propos des segments. Le point initial P a pour image(s) P'=S0(P) et P"=S1(P) dont l'un au moins est différent de P. PP' et/ou PP" sont les prototypes des segments de la figure. C'est à eux, et pas seulement aux points, qu'il convient d'appliquer successivement S0 etS1 pour construire cette figure et définir ainsi les segments quelle comporte..
Sous familles, sous figures
En éliminant une ou plusieurs symétries de la base on obtient une sous famille et éventuellement une sous figure.
Exemple :
Si (i0,i1) =π/12 , F1(i0,i1)est un polygone régulier à 12 côtés et F1(i0) est un de ces côtés.
Figures étoilée F1(...)
Quelle que soit la base de la famille et le point initial choisis les points de la figure sont les mêmes. Il n'en va pas de même pour les sous figures, et en particulier pour les segments. L'ensemble des points de F délimitent ce qu'on appelle l'enveloppe convexe de la figure
Pour un point P quelconque de la sphère unité d'un espace de dimension d, il est possible de déterminer les "d" espaces Tk les plus proches de P Les arêtes F1(ik) bordent l'enveloppe convexe. Pour que la figure définie soit convexe, il est donc suffisant de choisir comme base de la famille les Sk associés aux Tk définis plus haut,( angles de la forme π/n) et de prendre le point initial P à l'intérieur du domaine limité par ces Tk.
En dimension 2, il suffit de choisir (i0,i1)= π/n (n entier) et P sur le cercle unité "entre" T0 et T1
Les figures non convexes seront dites étoilées. Pour leur obtention ...
il suffit de choisir (i0,i1)=k π / n avec k>1 ou P en dehors du domaine délimité par T0 et T1
F1(i1,i0) avec ici (i0,i1)= 2 π /5 |
F1(i1,i0) avec ici (i0,i1)= π /4 et P en dehors d'un arc délimité par T0 et T1 |
|
|
(on n'essaiera pas ici à définir une 'face')
F2(..)_(..)
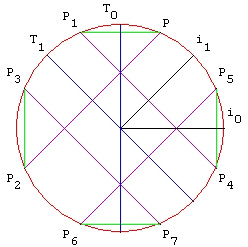
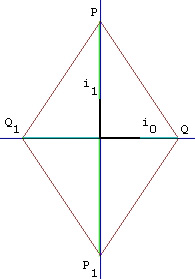
Considérons l'exemple suivant : (i0,i1)= π /2)
F2(i1,i0)_(i0,i1) sera la réunion de F1(i0,i1) et de F1(i1,i0) en s'affranchissant de la nécessité de choisir les points initiateurs P et Q sur le cercle unité, et en complétant par [PQ] et ses homologues
L'indice 2 désigne le nombre de points initiaux générateurs de la figure.
On reconnaît un losange avec ses diagonales.
Les segments PP1 Et QQ1 sont globalement invariants
Les segments tels que PQ ne le sont pas.
A propos des figures régulières.
On réservera cette appellation aux figures convexes dont les côtés et les angles sont égaux. A priori seule F1(..) peut être régulière. Dans l'exemple associé à une famille d'ordre 12, F1(i0,i1) ou F1(i1,i0) ne sont pas régulières car les segments F1(i0) et F1(i1) ne sont pas en général isométriques
Les polygones réguliers le sont!
Problème réciproque : Une figure régulière comportant un nombre fini de sommets est-elle associée à un Famille au sens définie plus haut.?
Etant donné 2 segments, ils sont homologues par une isométrie (centrale). Toutes les isométries possibles constituent le groupe (fini)de la figure. Les antidéplacements sont des symétries (ici axiales). Les rotations peuvent se décomposer en composées de symétries en s'imposant de réutiliser celles qui existent déjà!
On définit ainsi un ensemble fini de symétries dont les éléments géométriques se correspondent.
La réponse est oui.